un système géodésique local cohabite avec un système géodésique spatiale.
fig. 16-21 - Cohabitation des systèmes géodésiques
Sources : sat-info
V.2.2 - Dernière mise à jour : 08/11/2022
Synonyme : des datum géodésiques
- Traditionnellement (systèmes locaux), un référentiel géodésique* se définit par :
- un ellipsoïde* ;
- un point fondamental* ;
Jusqu'à l'avènement de la géodésie spatiale, c'était le lieu où l'ellipsoïde tangentait le géoïde. Ses coordonnées étaient définis par rapport aux astres. Pour la NTF, c'est à la croix du Panthéon de Paris que l'ellipsoïde de Clarke 1880 tangente le géoïde. C'est en ce lieu que l'altitude "H" et la hauteur ellipsoïdale "h" sont égales, que la verticale et la normale sont confondues.
- un azimut initial* (direction de référence pour définir le nord) ;
- un méridien origine (Greenwich, Paris, Potsdam, ...) ;
- une représentation plane associée (projection).
Exemple de projection cylindrique oblique présentée en mem22sig.htm :
Modèle géodésique
Nom du datum horizontal => D_Tananarive_1925
Nom de l'ellipsoide => International_1924
- Demi-grand axe => 6378388.000000
- Dénominateur du coefficient d'aplatissement => 297.000000
Point fondamental défini par (on est dans l'ouest d'Antananarivo) :
- Longitude du point de mesure azimutale => 46.437200
- Latitude de l'origine de la projection => -18.900000
- Constante en X => 400000.000000
- Constante en Y => 800000.000000
Azimuth initial : 18.9
Méridien origine : 46.4372
Représentation plane associée :
(Système de coordonnées horizontales)
- Nom du système de coordonnées projetées => Laborde
- Nom du système de coordonnées géographiques => GCS_Tananarive_1925
Nom de la projection cartographique Oblique Mercator
Facteur d'échelle de la ligne centrale: 0.999500
Sources : les métadonnées d'ESRI pour un fichier sur la région d'Antananarivo à Madagascar.
- Actuellement en France, mais également dans de nombreux pays,
un système géodésique local cohabite avec un système géodésique spatiale.
fig. 16-21 - Cohabitation des systèmes géodésiques
Sources : sat-info
- Le réseau géodésique français est constitué de :
- plus de 80 000 sites
soit un pour 7 km2 environ
- deux réseaux complémentaires
- le réseau NTF réalisé par triangulation
- le réseau RGF réalisé par GPS
- Il est utile de mettre en parallèle, pour l'avenir, le système local (NTF) et le système spatial (RGF93).
tableau n°3 - Les Systèmes géodésiques en usage en France
Sources : www.ign.fr
Systèmes locaux
Systèmes spatiaux
principe :
- ellipsoïde de référence
- point fondamental
- méridien origine
- représentation plane associée
précision du centre : quelques centaines de mètres.
principe :
- constantes fondamentales
- coordonnées tridimensionnelles (longitude, latitude, hauteur ellipsoïdale)
précision du centre : quelques mètres.Réalisations historiques France
- triangulation de Cassini (1733-1770)
- triangulation des Ingénieurs Géographes (1792-1884)
Systèmes mondiaux
Système européen :
- European Datum 1950 (ED50)
Système européen :
- European Terrestrial Reference System 1989 (ETRS89)
Système actuel en France :
- Nouvelle Triangulation de la France (NTF)
Système actuel en France :
- Réseau Géodésique Français 1993 (RGF93)
Lambert : projection associée au système géodésique NTF
- C'était, jusqu'en décembre 2000, le système réglementaire en France.
Depuis le 10 mars 2009, c'est le système spatial RGF.
C'est un décret du 3 mars 2006 (n°2006-272) qui impose aux services de l’État, collectivités locales et aux entreprises chargées de l’exécution d’une mission de service public d’être prêts à diffuser les données géographiques dans le système national de coordonnées défini dans le décret du 26 décembre 2000 (n° 2000-1276). Ces informations viennent du site du CERTU (www.certu.fr), très bon site d'info sur la géomatique.
- La projection associée est une représentation :
- plane ;
- conique ;
- conforme ;
- tangente ;
- avec réduction d'échelle ;
de l'ellipsoïde de Clarke 1880.
- Pourquoi cette projection n'est-elle plus conique sécante ? (cf. mem22sig.htm)
Réponse : "Mathématiquement, il est possible de définir une projection sécante comme étant une projection tangente avec un facteur d'échelle (de réduction) du cône. De nombreux logiciels de SIG ou de traitement d'images, utilisent ce mode de définition pour décrire les projections sécantes." (Sources : ESRI in : Généralités sur les systèmes de coordonnées)
tableau n°5 - Différents paramètres pour la projection Lambert 2 étendue
Sources : d'après ESRI
Lambert II étendue : projection sécante Lambert II étendue : projection tangeante Méridien central
0° (du méridien de Paris)
Méridien central
0° (du méridien de Paris)
Parallèles standard 1
45°53´56,108" Nord
Latitude origine
46°48´ Nord
Parallèles standard 2
47°41´45,652" Nord
Facteur d'échelle
0.99987742
X0
600 000 m
X0
600 000 m
Y0
2 200 000 m
Y0
2 200 000 m
- Dans le but de minimiser les déformations (altérations linéaires), la France a été découpée en 4 zones.
Une projection appelée "Lambert II étendu" couvre la France entière pour des besoins d'amplitude nationale.
La précision relative est estimée à 1 cm par km (10-5)
fig. 16 - Les projections Lambert
Sources : www.ign.frLes valeurs suivantes permettent le calcul des coordonnées en projection Lambert de l'ellipsoïde de Clarke 1880 IGN.
tableau n°5 - Les paramètres des projections Lambert
Zone Lambert
I
II
III
IV
II étendu
Zone application
53.5gr - 57gr 50.5gr - 53.5gr 47gr - 50.5gr Corse France entière Latitude origine
55gr = 49°30´ 52gr = 46°48´ 49gr = 44°06´ 46.85gr = 42°09´54" 52gr = 46°48´ Longitude origine
0gr Paris 0gr Paris 0gr Paris 0gr Paris 0gr Paris Parallèles
automécoïques48°35´54.682"
50°23´45.282"45°53´56.108"
47°41´45.652"43°11´57.449"
44°59´45.938"41°33´37.396"
42°46´03.588"45°53´56.108"
47°41´45.652"X0 : False Easting
600 000 m 600 000 m 600 000 m 234.358 m 600 000 m Y0 : False Northing
200 000 m 200 000 m 200 000 m 185 861.369 m 2 200 000 m Remarques : Les projections Lambert de la France sont en fait, par définition, des projections tangentes avec facteur d'échelle, les valeurs précédemment fournies sont celles des projections sécantes correspondantes car ce sont elles qui sont requises pour l'utilisation de certains récepteurs GPS.
Sur les cartes topographiques au 1 : 25 000 les valeurs des Y (ou N) sont exprimées en kilomètres et précédées du numéro de la zone (sauf pour le Lambert II étendu).Exemple : N = 196 000 m devient 3 196 pour la carte du mont Ventoux (Lambert III)
Sources : www.ign.fr
UTM : Projection associée au système géodésique Europe Datum 50
- Système :
- mis en place à la suite de la seconde guerre mondiale ;
- établi grâce aux réseaux nationaux de premiers ordres de l'Europe occidentale.
- La projection cylindrique UTM (Universal Transverse Mercator) :
- couvre le monde entier ;
- est constituée de 60 fuseaux de 6 degrés d'amplitude en longitude
pour l'hémisphère nord,
et
pour l'hémisphère sud.
La France est sur 3 fuseaux :
- UTM Nord fuseau 30 : entre 6 degrés ouest et 0 degré de Greenwich
- UTM Nord fuseau 31 : entre 0 degré et 6 degrés est de Greenwich
- UTM Nord fuseau 32 : entre 6 degrés est et 12 degrés est de Greenwich
fig. 17a - Les projections UTM
Sources : www.ign.frfig. 17b - Découpage de la zone Europe en bandes et fuseaux de la projection UTM
Sources : Notice WGS84
La numérotation des :
En dehors de la France (et de l'ED50), on trouvera des informations et représentations sur les fuseaux UTM :
et
par exemple !
|
Référentiel géodésique associé |
ED50 |
|
Ellipsoïde associé |
International (Hayford 1909) |
|
Point fondamental |
Potsdam |
|
X0 (False Easting) |
500 000 m |
|
Y0 (False Northing) |
0 m |
|
Longitude origine |
-3°, 3°, 9° Est
Greenwich |
|
Facteur d'échelle |
0.9996 |
Remarque : On emploie également la projection UTM associée à d'autres référentiels géodésiques (comme le WGS84), donc avec d'autres ellipsoïdes (IAG-GRS80 pour le RGF93 ou WGS84 pour le WGS84).
Sources : www.ign.fr
fig. 18 - Les chiffraisons marginales
Sources : www.ign.frLes deux échelles figurant dans le cadre portent des chiffraisons kilométriques :
- vers l'intérieur :
- en noir, les amorces du quadrillage kilométrique Lambert "zone", c'est-à-dire Lambert I, II, III ou IV. La valeur des Y des coordonnées en "Lambert zone" est toujours précédée du numéro de la zone Lambert (exemple : 3196 = 196 000 m Lambert III).
- en bleu, les amorces du quadrillage kilométrique Lambert II étendu. Le quadrillage Lambert II étendu n'est pas tracé sur la carte mais, en plus des amorces dans la marge, des croisillons à l'intérieur de la carte tous les kilomètres permettent de le reconstituer.
- en grades, les latitudes et longitudes rapportées au système français NTF
- vers l'extérieur :
- en noir, les amorces du quadrillage UTM du fuseau correspondant à la zone; en limite de deux fuseaux, les amorces coexistent en bleu et noir, les valeurs les plus faibles correspondant au fuseau de numéro supérieur.
- en degrés, les latitudes et longitudes rapportées au système ED50
Lambert-93 : Projection associée au système géodésique RGF93
- C'est, depuis décembre 2000, le système réglementaire français.
Le CNIG (Comité français de l'information géographique) a recommandé en 1989 la création d'un réseau, matérialisant pour le territoire français, un système de référence :
- tridimensionnel et orthonormé ;
- mondial ;
- géocentrique ;
- de précision centimétrique.
- Issu de plus d'un millier d'observation par GPS, le RGF93 est :
- la réalisation régionale (ou composante française) des systèmes :
- européens ETRS89 (European Terrestrial Reference System) ;
- mondiaux ITRS89 (International Terrestrial Reference System).
Ces trois systèmes sont cohérents et offrent une précision sur les coordonnées de l'ordre de 2 cm (Sources : CERTU ).
- issu de la densification des points européens
Les points du réseau RGF ont été observés par mesures satellitales GPS.
Ce réseau est structuré hiérarchiquement en 3 parties :
Le RRF : Réseau de Référence Français
23 points déterminés par géodésie spatiale de grande précision (précision 10-7).
fig. 19 - Répartition du Réseau de Référence Français
Sources : www.ign.frLe RBF : Réseau de Base Français
1 009 sites déterminés par technique GPS (précision 10-6) ;
soit environ un site tous les 25 km.
Le RDF : Réseau de Détail Français (un peu plus de 80 000 sites)
constitué en particulier de points de la NTF et de canevas géodésiques appuyés sur le RBF
- équivalent au système WGS84 (World Geodetic System) ;
- de précision centimétrique.
- Les coordonnées sont exprimées en coordonnées :
- tridimensionnelles ou géographiques (en longitude, latitude et hauteur ellipsoïdale) sur l'ellipsoïde IAG-GRS80 ;
- bidimensionnelles ou planes selon la projection Lambert-93 unique pour l'ensemble du territoire ;
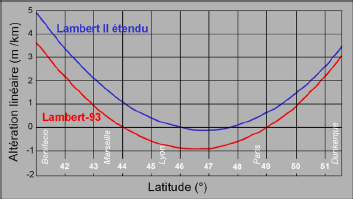
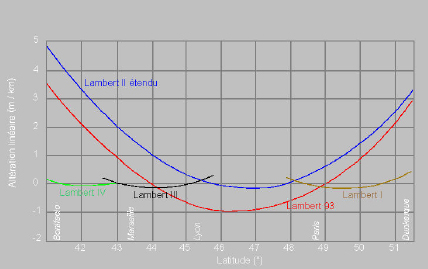
avec une précision relative estimée comprise entre - 1 m par km (presque 1 mm par km, soit 10-6) à + 3 m par km
elle était, au mieux de 1 cm par km (10-5) avec le Lambert 2 étendu, mais parfois jusqu'à 5 m par km.
fig. 20 - Comparaison de l'altération linéaire des projections Lambert II étendu et Lambert 93
Sources : CERTU (RGF93_theorie_et_concept_T2.pdf)
- La projection utilisée est une conique conforme sécante de Lambert appelée "Lambert-93".
Elle n'apparaît pas encore reportée sur les cartes topographiques.
tableau n°6 - Les paramètres de la projection Lambert-93
Référentiel géodésique
RGF93
Ellipsoïde associé
IAG-GRS80
X0 (False Easting)
700 000 m
Y0 (False Northing)
6 600 000 m
Latitude origine
46°30´ N
Longitude origine
3° Est Greenwich
Parallèles automécoïques
44° N et 49° N
Les constantes de la projection sont :
Sources : CERTU
(RGF93_theorie_et_concept_T3.pdf)
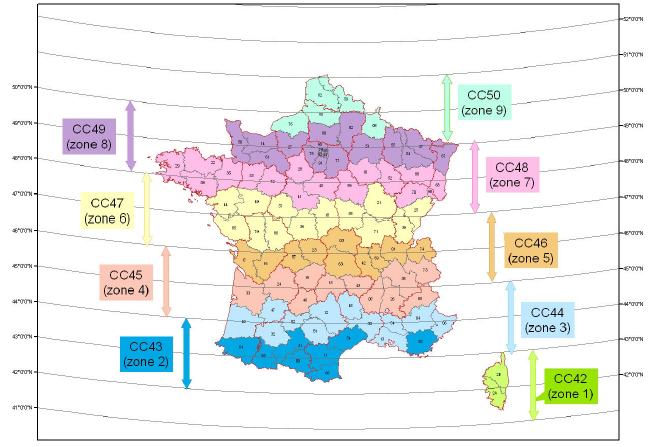
D'où la nécessité de créer 9 projections zonales du sud au nord de la France pour présenter une altération linéaire minimale.
Pour ne pas les confondre avec les projections zonales de la NTF, elles sont baptisées :
Projection conique conforme (CC) suivi du chiffre de la latitude du parallèle central.
Où se trouvent : CC44, CC50, CC42 ? (cf. figure 22)
fig. 22 - Carte des 9 projections coniques conformes
Sources : CERTU (RGF93_theorie_et_concept_T3.pdf)
Comme c'est visible sur la figure 22 :
- chaque zone est centrée sur un parallèle ;
- l'emprise est de 1° de part et d'autre du parallèle ;
- chaque zone recouvre les zones adjacentes de 50%.
tableau n°7 - Les des 9 zones de la projection Lambert-93
Sources : CERTU (RGF93_theorie_et_concept_T3.pdf)
Numéro de zone (NZ) 1 2 3 4 5 6 7 8 9 Projection CC42 CC43 CC44 CC45 CC46 CC47 CC48 CC49 CC50 Latitude origine ?0 42°
43°
44°
45°
46°
47°
48°
49°
50°
Longitude origine ?0 3°
3°
3°
3°
3°
3°
3°
3°
3°
Parallèle standard ?1 41,25°
42,25°
43,25°
44,25°
45,25°
46,25°
47,25°
48,25°
49,25°
Parallèle standard ?2 42,75°
43,75°
44,75°
45,75°
46,75°
47,75°
48,75°
49,75°
50,75°
Constante E0 1 700 000 m
1 700 000 m
1 700 000 m
1 700 000 m
1 700 000 m
1 700 000 m
1 700 000 m
1 700 000 m
1 700 000 m
Constante N0 1 200 000 m
2 200 000 m
3 200 000 m
4 200 000 m
5 200 000 m
6 200 000 m
7 200 000 m
8 200 000 m
9 200 000 m
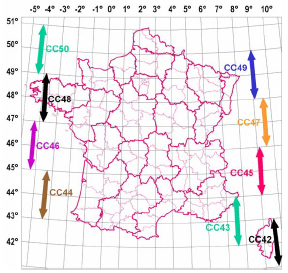
fig. 23 - Carte du positionnement des départements dans les coniques conformes
Cette carte est une recommandation de la Direction générale des finances publiques (DGFiP, ex DGI) qui n'a aucun caractère obligatoire.
Le système WGS84 (World Geodetic System 1984)
- Système mis au point :
- par le département de la défense (DoD) des États-Unis ;
- par observations Doppler de points depuis des satellites.
=> d'où la précision métrique
C'est le prolongement du WGS72.
- Il est utilisé pour exploiter les signaux radiodiffusés du GPS (Global Positioning System).
Caractéristiques :
- exactitude de l'ordre du mètre
- ellipsoïde associé : WGS84 (en fait IAG-GRS80 très légèrement modifié)
- réalisation récente (G873) est équivalente au niveau décimétrique à ITRF94
- projection courante associée : UTM
- Il apparaît sur les "Série bleue" et "Top 25" sous forme d'un pseudo-quadrillage en surimpression.
fig. 21 - La surcharge "GPS" sur une TOP25
Sources : Carte Top25 3342 OT - Manosque Forcalquier, 1ère édition, 1996
- La surcharge GPS, du système WGS84, est renseignée comme suit :
- 711 correspond à => 711 000 m vers l'est de l'origine du repère (fuseau UTM 31) ;
- 4 873 correspond à => 4 873 000 m vers le nord de l'origine du repère (l'Équateur).
Constater l'orientation de la surcharge GPS par rapport aux bords de la carte.
- La projection Lambert, du système NTF, apparaît sous deux aspects :
- 864 correspond à => 864 000 m vers l'est de l'origine du repère
c'est du Lambert II étendu
- 864 correspond à => 864 000 m vers l'est de l'origine du repère
c'est du Lambert 3
Constater le décalage entre les deux projections.
- 1 892 correspond à => 1 892 000 m vers le nord de l'origine du repère
c'est du Lambert II étendu
- 3 192 correspond à => 192 000 m vers le nord de l'origine du repère
c'est du Lambert 3
- D'un point de vue pratique, la réalisation WGS84 pour l'Europe est considérée comme celle de l'ETRS89.
Pour la France métropolitaine, on considère comme équivalent les systèmes :
- WGS84,
et
- RGF93.
- Le système ITRF (International Terrestrial Reference Frame)
L'ITRF est un système de référence terrestre de l'International Earth Rotation Service (IERS), il est ;
- matérialisé par un réseau mondial de près de 300 points ;
- exact au niveau centimétrique.
C'est un des systèmes géodésiques mondiaux les plus précis avec le système DORIS.
Sans l'ITRF, pas de
géolocalisation possible !
- Le système DORIS (Doppler Orbitography Radiopositionning Integrated by Satellite)
Le Doris est un système de référence mondial des plus précis. Son exactitude est au niveau centimétrique.
Comme l'ITRF, il permet de mesurer des vitesse de déplacement tels :
- les mouvements tectoniques des plaques
- le rebond post-glaciaire, etc.
- On lui applique également des corrections diverses :
- marées terrestres ;
- pression atmosphérique, etc.
- Permet de calculer la position altimétrique des satellites de la série des SPOT par exemple :
- précision de 13 cm pour
SPOT2 ;
- 1 cm maintenant (Sources : www.ign.fr)
- Le système ETRS89 (European Terrestrial Reference System 1989)
Le système ETRS89 est défini à partir de l'ITRS. Il coïncide avec ITRS (époque 1989.0).
Il est attaché à la partie stable de la plaque eurasienne.
Successeur de ED87 (et donc de l'ED50), initialement localisé sur l'Europe occidentale, l'ETRS89 s'étend à présent sur l'Europe de l'Est.
La cohérence du système ETRS89 avec WGS84 est métrique.
Il est bien sûr possible de passer d'un système géodésique à un autre.
Un très bon outil didactique est proposé en fin de la fiche sur les systèmes de références VIII pour les BTS Géomètres.
Il permet de comparer les rotations imposées à la grille et les caractéristiques de plusieurs systèmes géodésiques sur la France.
Enfin, on lira avec intérêt les deux pages suivantes proposées par ESRI relatives aux opérations de géoréférencement :
Vue d'ensemble du géoréférencement qui évoque entre autre : les points de contrôle (amers), la transformation des rasters, l'erreur quadratique moyenne (EQM)...
Fichiers de géoréférencement pour les jeux de données
raster qui évoque entre autre : les règles de dénomination des
fichiers de géoréférencement, le géoréférencement et fichiers de
géoréférencement , le contenu du fichier de géoréférencement...
Communiquez-moi sur la plateforme Moodle, à la rubrique travaux, les réponses aux questions suivantes :
Question n°2.3.1. Le Lambert-93 est-il :
a) un système géodésique
c) un ellipsoïde
b) une projection
d) un repère altimétrique séquano-dionysien
Question n°2.3.2. Le pseudo-quadrillage kilométrique GPS est-il plus proche du pseudo-quadrillage kilométrique :
a) Lambert-93
c) RRF
b) Lambert II étendue
d) NGF69
Question n°2.3.3. Quel est l'ellipsoïde à référence globale dans la liste suivante :
a) Clarke 1880
c) CIRCE2000
b) Hayford 1909
d) IAG-GRS 1980
NB : les mots suivis de "*" font partie du vocabulaire géographique, donc leur définition doit être connue. Faites-vous un glossaire.