Vincent GODARD
Département de Géographie
Université de Paris 8
V.2.3. - Dernière mise à jour :
19/05/2025
Fiche Mémo n°5.2. du cours de Télédétection niveau 2 :
ou
Fiche Mémo n°2.5. du cours de SIG et analyse spatiale :
Positionnement par GNSS (Géolocalisation et Navigation par
un Système de Satellites) - 2ème partie
Rôle et fonctionnement des positionneurs par
satellites
Pour répondre à la question : "Où suis-je ?"
1. Comment ça marche ?
C'est un problème de triangulation (cf. mem21sig.htm)
fig. 1 - Une triangulation spatiale pour calculer sa position
Source : Tutoriel Trimble
1.1 Le positionnement
Pour nous localiser, le récepteur doit calculer :
Le récepteur reçoit des données codées :
- les données d'almanach => positions approximatives des
satellites
- permettent l'initialisation des traitements
- permettent la traque des satellites qui vont ou doivent être en
vue
- les données d'éphémérides => données corrigées par les
stations sol
- corrigent, entre autres, des changements d'attitude et
d'altitude des satellites (qui ne sont pas connues à l'avance dans
l'almanach)
- mettent hors jeux un satellite défaillant...
1.2 Le temps
Pour connaître sa position, il faut savoir :
Il faut calculer le temps mis par le signal pour atteindre le
récepteur.
La distance qui sépare notre récepteur d'un satellite est :
Distance = Vitesse X Temps de voyage
où
Vitesse = vitesse de la lumière dans le vide (onde radio = onde
électromagnétique => 300 000 kilomètres / seconde) et une petite
correction pour la traversée de l'atmosphère ;
Temps de voyage = le récepteur calcule le décalage entre l'heure
émise par le satellite et celle du récepteur
- il faut quatre satellites pour compenser les erreurs d'horloge du
récepteur (il n'a pas embarqué d'horloge atomique lui !) ;
- pour ne pas se tromper de satellite, le récepteur compare les
codes pseudo-aléatoires des satellites et ceux de l'almanach.
1.3 Une triangulation dans l'espace
Avec l'azimut, l'élévation et la distance, le récepteur est localisé assez
précisément à l'intérieur d'une sphère
celle qui permet de recevoir les signaux du satellite (cf. fig. 2a)
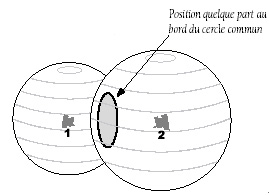
La réception d'un deuxième satellite va permettre d'affiner la position
du récepteur par l'intersection de deux sphères
le récepteur est sur le cercle qui matérialise l'intersection des
deux sphères (cf. fig. 2b ou fig. 3)
fig. 2a-b-c - Une position à
l'intersection de sphères
Source : Tutoriel Trimble
La réception d'un troisième satellite va réduire la position possible
d'une multitude de points sur un cercle (cf. fig.
2b ou fig. 3)
à deux seulement deux points (cf. fig.
2c)
fig. 3 - Quelque part à l'intersection des deux
sphères...
Source : Tutoriel Garmin
L'ambiguïté sera levé :
parce qu'il nous faut un quatrième satellite (pour le calcul de
pseudo-distance par correction de l'horloge interne du GPS)
Parsac nous sommes à la surface de la Terre (cf. fig.
4)
fig. 4 - Quand on a les pieds sur Terre, une de
ces positions est impossible...
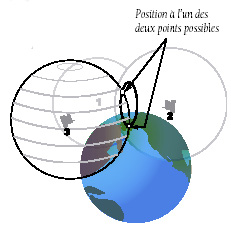
Source : Tutoriel Garmin
2. Le GPS et les erreurs
2.1. Les erreurs liées au système
- Le Selective
Availability (SA)
* dégradation sélective voulue par l'US DoD
* n'est plus en vigueur
depuis le 2 mai 2000 (jusqu'à nouvel
ordre)
- sans le SA : 95 % des
mesures sont à moins de 40 m de la position estimée
- avec le SA : 95 % des
mesures sont à moins de 100 m de la position estimée
fig. 5 - La difficile traversée de l'atmosphère
Source : Tutoriel Trimble
- La traversée de l'ionosphère
* couche ionisée par les rayons solaires, s'étend
entre 50 et 1 000 km
* fait
varier les mesures de distances de 0 à 50 m
- La traversée de la troposphère
* couche basse de l'atmosphère, s'étend entre 7 et
14 km
* fait
varier les mesures de distances de 2 à 30 m
* fonction de la hauteur (élévation) du satellite au dessus de l'horizon
- Les erreurs d'éphémérides
* appellées aussi erreurs d'orbites (inexactitude
dans la position envoyée du satellite)
* précision des orbites radio-diffusées
* fait
varier les mesures de distances de 0 à 20 m
(sans le SA)
2.2. Les erreurs liées à l'environnement
- Le multi-trajet : quand l'onde n'est pas directe
* réflexion sur des obstacles
fig. 6 - Bloquage et rebonds du train d'ondes
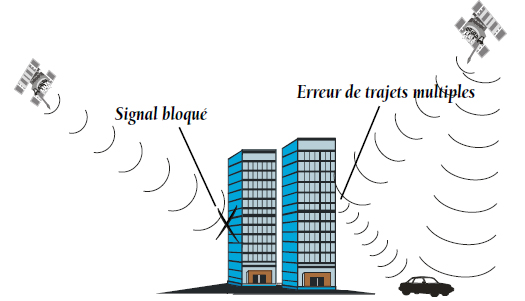
Source : Tutoriel Garmin
- Le récepteur et ses caractéristiques
* nombre des canaux
* l'antenne de réception
* la qualité de l'horloge
- La Dilution
de la précision (DOP)
* géométrie des satellites défavorables (alignés,
bas sur l'horizon, ...)
Ces erreurs sont partiellement corrigées par la
technique de GPS Différentiel DGPS et les modes opératoires
Des informations complémentaires sur le site de Trimble
2.3. La correction des erreurs
La correction des erreurs s'obtient en combinant un
récepteur GPS et un récepteur GPS différentiel (DGPS).
Des informations complémentaires sur le site
de Trimble
fig. 7 - Comment le GPS différentiel marche-t-il ?

Source : Tutoriel Garmin
fig. 8 - Comment le GPS différentiel marche-t-il ?

Source : Tutoriel Garmin
fig. 9 - Comment le GPS différentiel marche-t-il ?

Source : Tutoriel Garmin
fig. 10 - Comment le GPS différentiel marche-t-il ?

Source : Tutoriel Garmin
fig. 11 - Comment le GPS différentiel marche-t-il ?

Source : Tutoriel Garmin
2.4. Le brouillage
Depuis la première guerre du Golfe (ici évoquée pour la
deuxième en 2003 Futura Sciences), des actions de brouillage du
signal GPS sont suspectées et parfois documentées (on lira, en
particulier, des exemples sur le site de l'Agence nationale des
fréquences ANFR).
Ici un exemple de zone de brouillage permettant de localiser la
position [militaire ? à Kaliningrad, ou en Pologne ou au Danemark.
Choisissez votre
suspect comme dit le post (@auonsson sur X, la suite actualisée ici @auonsson.bsky.social
sur Bluesky)] du brouilleur pendant la
guerre en Ukraine.
fig. 12 - Un exemple d'extension et d'intensité de brouillage de
réception GPS

Source : @auonsson sur X
3. Test de compréhension
|
Communiquez-moi sur la plateforme
Moodle, à la rubrique travaux, les réponses aux questions
suivantes :
Question n°5.1.1. Parmi
les programmes suivants, quels sont ceux qui n'assurent pas
une couverture mondiale :
a) Beidou
|
d) GPS
|
b) Galileo
|
e) IRNSS
|
c) Glonass
|
f) QZSS
|
Question n°5.1.2. Ce
sont les satellites de quelle constellation qui, vus du sol,
se retrouvent à la même place dans le ciel après plus de six
jours sidéraux :
a) Beidou
|
d) GPS
|
b) Galileo
|
e) IRNSS
|
c) Glonass
|
f) QZSS
|
Question n°5.1.3. Les
récepteurs "haut de gamme" permettent des corrections de
position en temps réels. Indiquez l'acronyme ou la norme qui
vous paraît convenir :
a) USB
|
d) RTCM
|
b) Bluetooth
|
e) RTK
|
c) NMEA
|
f) RS232
|
Question n°5.1.4. Dans
quelle(s) couche(s) la constellation des Navstar des GPS
évolue-t-elle :
a) Troposphère
|
d) Thermosphère
|
b) Stratosphère
|
e) Exosphère
|
c) Mésosphère
|
f) Ionosphère
|
Question n°5.1.5. Quelle
couche atmosphérique peut être la cause des plus importantes
erreurs de positionnement :
a) Troposphère
|
d) Thermosphère
|
b) Stratosphère
|
e) Exosphère
|
c) Mésosphère
|
f) Ionosphère
|
|
Retour au début de la fiche Mémo
Fiche Mémo suivante